|
|
dgFloat32 | GetJointAngle0 () const |
| |
|
dgFloat32 | GetJointAngle1 () const |
| |
|
dgFloat32 | GetJointOmega0 () const |
| |
|
dgFloat32 | GetJointOmega1 () const |
| |
|
dgVector | GetJointForce () const |
| |
|
dgFloat32 | CalculateStopAlpha0 (dgFloat32 angle, const dgJointCallBackParam *param) const |
| |
|
dgFloat32 | CalculateStopAlpha1 (dgFloat32 angle, const dgJointCallBackParam *param) const |
| |
|
void | SetJointParameterCallBack (dgUniversalJointAcceleration callback) |
| |
|
virtual void | SetDestructorCallback (OnConstraintDestroy destructor) |
| |
|
dgUnsigned32 | GetId () const |
| |
|
dgBody * | GetBody0 () const |
| |
|
dgBody * | GetBody1 () const |
| |
|
dgBodyMasterListRow::dgListNode * | GetLink0 () const |
| |
|
dgBodyMasterListRow::dgListNode * | GetLink1 () const |
| |
|
void * | GetUserData () const |
| |
|
bool | IsCollidable () const |
| |
|
dgInt32 | GetMaxDOF () const |
| |
|
void | SetUserData (void *userData) |
| |
|
void | SetCollidable (bool state) |
| |
|
virtual void | GetInfo (dgConstraintInfo *const info) const |
| |
|
|
virtual void | Init () |
| |
|
virtual void | Remove (dgWorld *world) |
| |
|
virtual bool | IsBilateral () const |
| |
|
virtual dgFloat32 | GetStiffness () const |
| |
|
virtual void | SetStiffness (dgFloat32 stiffness) |
| |
|
void | SetPivotAndPinDir (const dgVector &pivot, const dgVector &pinDirection) |
| |
|
void | SetPivotAndPinDir (const dgVector &pivot, const dgVector &pinDirection0, const dgVector &pinDirection1) |
| |
|
dgVector | CalculateGlobalMatrixAndAngle (dgMatrix &globalMatrix0, dgMatrix &globalMatrix1) const |
| |
|
void | CalculateMatrixOffset (const dgVector &pivot, const dgVector &dir, dgMatrix &matrix0, dgMatrix &matrix1) |
| |
|
virtual void | JointAccelerations (const dgJointAccelerationDecriptor ¶ms) |
| |
|
virtual void | JointAccelerationsSimd (const dgJointAccelerationDecriptor ¶ms) |
| |
|
virtual void | JointVelocityCorrection (const dgJointAccelerationDecriptor ¶ms) |
| |
|
void | SetMotorAcceleration (dgInt32 index, dgFloat32 accelration, dgContraintDescritor &desc) |
| |
|
void | SetJacobianDerivative (dgInt32 index, dgContraintDescritor &desc, const dgFloat32 *jacobianA, const dgFloat32 *jacobianB, dgFloat32 *jointForce) |
| |
|
void | CalculatePointDerivative (dgInt32 index, dgContraintDescritor &desc, const dgVector &normalGlobal, const dgPointParam ¶m, dgFloat32 *jointForce) |
| |
|
void | CalculateAngularDerivative (dgInt32 index, dgContraintDescritor &desc, const dgVector &normalGlobal, dgFloat32 stiffness, dgFloat32 jointAngle, dgFloat32 *jointForce) |
| |
|
dgFloat32 | CalculateSpringDamperAcceleration (dgInt32 index, const dgContraintDescritor &desc, dgFloat32 jointAngle, const dgVector &p0Global, const dgVector &p1Global, dgFloat32 springK, dgFloat32 springD) |
| |
|
void | SetUpdateFeedbackFunction (ConstraintsForceFeedback function) |
| |
|
void | InitPointParam (dgPointParam ¶m, dgFloat32 stiffness, const dgVector &p0Global, const dgVector &p1Global) const |
| |
|
void | InitInfo (dgConstraintInfo *const info) const |
| |
|
dgMatrix | m_localMatrix0 |
| |
|
dgMatrix | m_localMatrix1 |
| |
|
dgFloat32 | m_stiffness |
| |
|
dgFloat32 | m_jointForce [32] |
| |
|
dgInt32 | m_rowIsMotor [32] |
| |
|
dgFloat32 | m_motorAcceleration [32] |
| |
|
OnConstraintDestroy | m_destructor |
| |
|
void * | m_userData |
| |
|
dgBody * | m_body0 |
| |
|
dgBody * | m_body1 |
| |
|
dgBodyMasterListRow::dgListNode * | m_link0 |
| |
|
dgBodyMasterListRow::dgListNode * | m_link1 |
| |
|
ConstraintsForceFeedback | m_updaFeedbackCallback |
| |
|
dgUnsigned32 | m_dynamicsLru |
| |
|
dgUnsigned32 | m_index: 16 |
| |
|
dgUnsigned32 | m_maxDOF: 6 |
| |
|
dgUnsigned32 | m_constId: 6 |
| |
|
dgUnsigned32 | m_enableCollision: 1 |
| |
|
dgUnsigned32 | m_isUnilateral: 1 |
| |


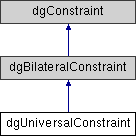
 Public Member Functions inherited from dgBilateralConstraint
Public Member Functions inherited from dgBilateralConstraint 1.8.13
1.8.13